A virtual articulator for CT guided dental implant positioning
M. Truppe
The use of image guided navigation systems for intraoperative dental implant positioning has been reported by several research groups, either using a resin splint [1] or an image guided drill positioning system [2]. For the preoperative simulation different solutions were proposed to transfer dentition and occlusion into a computer model. One approach is to remodel the dental arch by stereolithography [3, 4], another is the reconstruction of the dental arch in the computer after surface scanning [5].
Although there are various new approaches for registration of the preoperative simulation with the patients anatomy they are either too inaccurate yet or do not integrate well into the working environment. And most importantly we want to integrate the diagnostic waxup in the simulation of the implant position [6].
We present a new technique for
- CT image guided positioning of trial abutments
- visualization of finished prosthesis through integration of diagnostic waxup
by 3D annotation of virtual structures to the dental plaster casts, based on augmented reality visualization technology.
Common to most simulation approaches is the interaction with the simulation in the computer. Although this makes sense in most of the cases it would ignore our requirements, the integration of axiographic data and prosthetic waxup.
Therefore we have developed a method that offers two advantages:
- Visualization of the simulation is on the plaster cast model, by augmenting a video image of the plaster cast
- Registration of the plaster cast relative to the CT of the patient is performed automatically
A 3D digitizing tablet is used with a mean accuracy of 0.2 mm. Because the technology is based on magnetic fields the accuracy of the digitizer deteriorates under presence of large pieces of metal. Therefore we have built an articulator made of resin with the physical dimensions of the standard articulator. The dental plaster casts are put into the articulator. A 3D sensor is attached to the upper and lower plaster cast. In case of simulation of osteotomies a 3D sensor is attached also to the mobile plaster segment. A video camera is positioned for a close up view of the plaster casts.
The registration of the CT relative to the dental plaster cast is done via the standard face-bow, extended with radiopaque markers. Therefore the standard articulator fixation technique can be used for the plaster cast - CT image coordinate transformation. After this step the plaster casts can be moved freely. A drill with 3D sensor attached is positioned relative to the plaster cast, the CT slices on the computer screen show the trajectory of the current position. The CT slices are scrolled automatically to correlate with the tip of the drill or a 3D stylus (Fig.1-3). The visualization is identical to the intraoperative situation for image guided positioning of the implant drill. The planned implants are then visible as graphic overlay on the dental models, visible in the live video images.
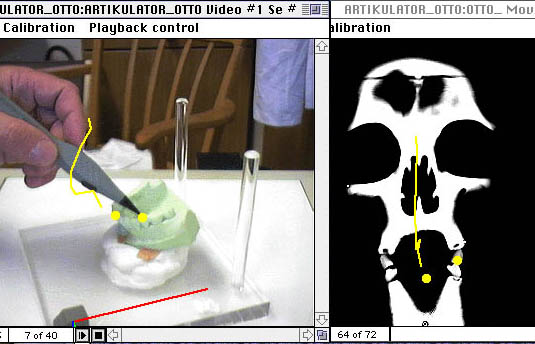
Figure 1
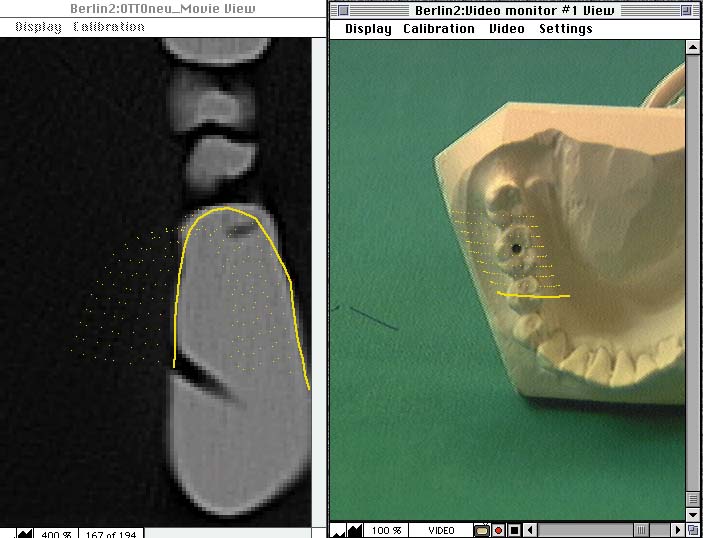
Figure 2
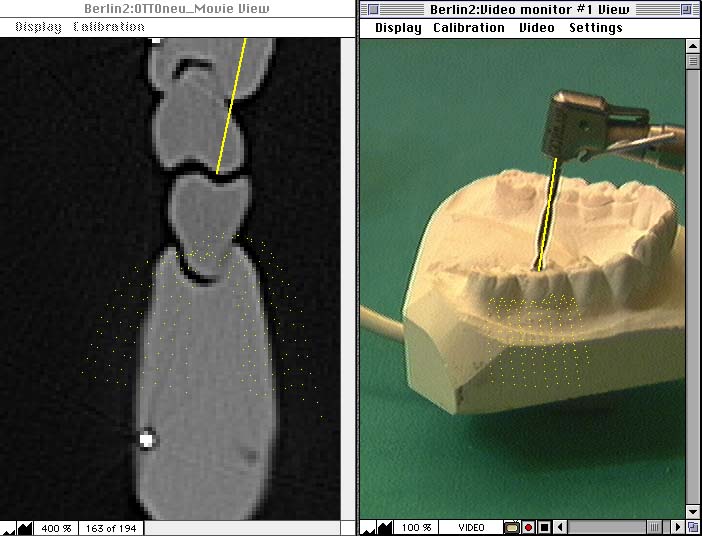
Figure 3
This enables the surgeon to simulate the implant position optimized for parallelization and bone structure directly on the plaster cast. The diagnostic waxup uses this planned abutments. In an interactive process the implant position can be changed.
Discussion
The dental plaster cast mounted in an articulator is standard equipment. Our method of stereotactic registration of the plaster cast models is based on the mounting in the articulator. The reference structure for visualization is a real model of the dental plaster cast that is shared across different departments. This approach allows a collaborative decision process that takes a unique approach to information transfer. We combine visualization in the form of a wax-up with virtual structures defining the implant position. This makes it possible to combine simulation of implant positioning with established highly accurate planning of the suprastructure in the articulator.
Bibliography
[1] T. Fortin, J. Coudert, G. Champleboux, P. Sautot, and S. Lavallée, "Computer-Assisted Dental Implant Surgery Using Computed Tomography," J Image Guid Surg, vol. 1, pp. 53-58, 1995.
[2] P. Solar, S. Rodinger, C. Ulm, S. Grampp, B. Gsellmann, and M. Truppe, "A computer-aided navigation system for oral implants using 3D-CT reconstructions and real time video projection," presented at Computer Assisted Radiology, Paris, 1996.
[3] V. Hietschold, W. Harzer, L. Eckhardt, U. Eckelt, E. John, J. Hoffmann, S. Klengel, A. Sichting, and K. Köhler, "Stereolithography of the occlusion plane using MR-tomographic imaging of the set of teeth," presented at Computer Assisted Radiology, Paris, 1996.
[4] J. Lambrecht, C. Besimo, W. Müller, and F. Cairoli, "Precision of presurgical implantological planning with digitised CT and SCANORA," presented at Computer Assisted Radiology, Paris, 1996.
[5] T. Kuroda, N. Motohashi, R. Tominaga, and K. Iwata, "Three-dimensional dental cast analyzing system using laser scanning," Am J Orthod Dentofacial Orthop, vol. 110, pp. 365-369, 1996.
[6] A. Sethi and P. Sochor, "Predicting esthetics in implant dentistry using multiplanar angulation: a technical note," Int J Oral Maxillofac Implants, vol. 10, pp. 485-90, 1995.
Forschungsinstitut | Artma | Technology | Email